|
|
A.位姿表示
开篇我们引入一个例子:
来自于-现代机器人学
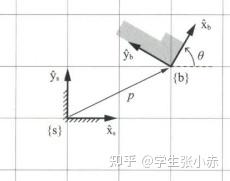
平面中我们选择一个固定坐标系{s},单位坐标轴用\hat x_s与\hat y_s表示坐标轴的单位向量,在阴影物体上安装一个物体坐标系{b},我们如何清晰的表达阴影物体的位姿?其实就是表达出{b}相对于{s}的关系。
位置就是图中的向量p p=(p_x,p_y)表达了物体的位置,也可以使用p=p_x\hat x_s+p_y\hat x_s上式更加清晰的表达,并且反应出了向量p所在的参考坐标系。
对于姿态,最简单的方法就是给定转角\theta,如图所示。还可以给出物体坐标系{b}中两个单位坐标轴相对固定坐标系{s}中两个单位坐标轴的方向,即\hat x_b=cos\theta \hat x_s + sin\theta \hat y_s\\\hat y_b=-sin\theta \hat x_s + cos\theta \hat y_s这是我们以后经常用的哦! 对于这个式子解释一下,当假想一个刚体在三维空间内做任意运动时,用单个转角\theta无法描述物体坐标系姿态,需要3个转角参数。对于这三个转角参数,使用上式用参考坐标系坐标轴表示物体坐标系坐标轴,就十分直观了。
物体坐标系原点p写成向量形式p= \begin{bmatrix} p_x\\p_y \end{bmatrix} 单位向量x_by_b写成列向量形式,分解出矩阵[\hat x_b \ \hat y_b]=\begin{bmatrix} \hat x_s \ \hat y_s\end{bmatrix} * \begin{bmatrix}cos\theta & -sin\theta \\ sin\theta & cos\theta\\ \end{bmatrix}
上式表明阴影物体姿态(物体坐标系单位轴)可使用基坐标单位轴通过矩阵P = \begin{bmatrix}cos\theta & -sin\theta \\ sin\theta & cos\theta\\ \end{bmatrix}的作用后表示。矩阵P表示的是一个旋转矩阵,P有4个元素,不过有3个限制条件,两列是单位向量并且正交,这样只有一个单自由度参数\theta。
我们组成(P,p)来描述\{b\}相对\{s\}的位姿。 |
|


 发表于 2022-12-28 12:41:10
发表于 2022-12-28 12:41:10